
Wyznaczanie pozycji to umiejętność, która w ostatnich latach zanika. Wystarczy spojrzeć na ekran telefonu albo samochodowej nawigacji GPS, a program pokaże gdzie użytkownik się znajduje i zaprowadzi tam, gdzie chciałby się znaleźć (użytkownik, nie program – choć z tym to różnie bywa).
Żeby nauczyć się korzystać z satelitów nawigacyjnych w sposób, który dziś wydaje się oczywisty, potrzeba było pięciu dekad rozwoju systemu i kilku wydarzeń, które uczyniły go dostępnym dla całego społeczeństwa. W dodatku za darmo.

Okręty podwodne i rakiety balistyczne
Okręty podwodne z napędem atomowym miały strategiczną rolę w zimnowojennym wyścigu zbrojeń. Mogły dostarczyć rakiety balistyczne z głowicami nuklearnymi w pobliże terytorium przeciwnika – pozwalając na celniejsze uderzenie, które dawało niewiele czasu zaskoczonemu przeciwnikowi. W przeciwieństwie do stałych wyrzutni na lądzie, mogły pozostać w ukryciu i przetrwać pierwsze uderzenie. Były gwarancją uderzenia odwetowego. Na nich opierała się doktryna gwarantowanej obustronnej zagłady (MAD – Mutual Assured Destruction) – obie strony miały pewność, że rozpoczęta wojna nuklearna zakończy się katastrofą dla wszystkich. Żeby doktryna działała, okręty podwodne musiały pozostać niewykryte. I musiały być skuteczne. I tu pojawił się problem.
Nawigacja morska w latach pięćdziesiątych opierała się na systemie LORAN i LORAN-C. Nawigator (lub komputer nawigacyjny – od momentu kiedy się pojawiły) porównywał sygnały radiowe dwóch lub więcej stacji systemu i otrzymywał pozycję. Dokładność wahała się od kilkudziesięciu metrów do kilometra, a na większych dystansach od nadajnika – do kilku a nawet kilkunastu kilometrów. I zależała od odległości między nadajnikami a odbiorcą sygnałów oraz od dokładności sporządzonych map. Najlepszą precyzję system osiągał w pobliżu ustawionych na wybrzeżu nadajniki. Im dalej, tym gorzej, a w odległości większej niż 1000 mil dokładność spadała do 2-3 mil (LORAN-C). To zdecydowanie za mało, by celnie wystrzelić rakietę balistyczną, nawet jeśli celem jest średniej wielkości miasto. Potrzebne było urządzenie, które zapewni sygnały nawigacyjne w każdym miejscu globu (LORAN-C dawał jedynie nadzieję na pokrycie 80% powierzchni oceanów po pełnym rozwinięciu systemu) i zapewni większą dokładność oraz pewność nadawania sygnałów (stacje LORAN budowano w tak niedostępnych miejscach jak bezludna wyspa Jan Mayen na północnym Atlantyku – te stacje łatwo było przeciwnikowi zniszczyć). Rozwiązanie dostarczyli Sowieci, wystrzeliwując Sputniki.
Transit
Obserwując sygnały nadawane przez satelity Sputnik naukowcy zauważyli zmianę długości fal w zależności od tego czy satelita się zbliżał czy oddalał od punktu obserwacji. Te zmiany można było wykorzystać do ustalenia orbity satelity. Effekt Dopplera był już wtedy znany, więc obserwacja nie była zaskoczeniem. Ale twórczo ją rozwinięto. Skoro można było ustalić pozycję satelity opierając się na pomiarach sygnału i pozycji obserwacji, to można było również ustalić pozycję obserwatora opierają się na tych samych sygnałach, jeśli znana była dokładnie orbita nadajnika. Pomysł chwycił, a amerykańska marynarka wyłożyła środki. Początkowe prace wykonano w rekordowym tempie – pierwsze dwa Sputniki Związek Radziecki wystrzelił w październiku i listopadzie 1957, a prototypowego satelitę nawigacyjnego Amerykanie wystrzelili we wrześniu 1959. Po umieszczeniu drugiego satelity (1960) rozpoczęto testy. Cztery lata i kilka satelitów później system miał status operacyjny.
Transit dawał możliwości, których potrzebowała marynarka wojenna w tym czasie – czyli możliwość określenia pozycji z dokładnością do kilkuset metrów w każdym punkcie na ziemi. Ale nie był idealny. Działał tylko na określonej wysokości (na ogół na poziomie morza, odbiorniki na lądzie musiały być skalibrowane na odpowiednią wysokość), wymagał ciągłego odbioru sygnału w czasie kiedy satelita był nad horyzontem, a jego odbiornik początkowo był tak duży, że trzeba było zaprojektować specjalny komputer, który dało się włożyć na okręt podwodny (rozmiar ograniczono do wymiarów niewielkiej szafy). O zastosowaniu w lotnictwie nie było mowy.
Nawet tak niedoskonały system zyskał popularność. Najpierw w amerykańskiej marynarce (nie ograniczano się do okrętów podwodnych), później trafił w ręce cywilne, a przy okazji – do Związku Radzieckiego. Sowieci zbudowali własne systemy Cyklon i Cykada działające na podobnej zasadzie.
Z czasem potrzebny był system o większej dokładności.
NAVSTAR
Podstawową wadą systemu Transit było ograniczenie użyteczności do zastosowań morskich. A odbiorcą nawet bardziej zainteresowanym precyzyjną nawigacją w dowolnym miejscu na ziemi było lotnictwo wojskowe. W latach 50. i 60. bombowce osiągnęły (z pomocą tankowania w powietrzu) zasięg globalny i mogły pokonać drogę do celu (w domyśle – do ZSRR) przez pozbawione charakterystycznych punktów obszary arktyczne. Korzystano z nawigacji inercyjnej (obarczonej dużym błędem po kilku godzinach lotu) i z astronawigacji (pod warunkiem, że było widać gwiazdy, akurat była noc i nie pojawiła się zorza polarna). Potrzebne było coś więcej.
Nowy pomysł opierał się na innym wykorzystaniu satelitów. Skoro można było (w sprzyjających warunkach) robić namiary na gwiazdy i wyznaczać z nich pozycję, to przecież można było wziąć namiary na gwiazdy sztuczne – satelity. I tu potrzebna była dokładna znajomość pozycji takich sztucznych gwiazd. Ten problem rozwiązano nadając kompletną informację o orbitach. Zamiast używać zjawiska dopplera do określenia położenia skorzystano z pomiaru czasu w jakim sygnał pokonał drogę z satelity do odbiornika. Pozycję (jak w astronawigacji) wyznaczano przez porównanie pomiarów kilku satelitów (czyli inaczej niż w Transicie, w którym wystarczał jeden). Nowy system nazwano NAVSTAR. Gwiazda nawigacyjna, choć oficjalne rozwinięcie skrótu to Navigation Signal Timing and Ranging. Równolegle pojawiło się określenie Globalny System Pozycyjny – GPS.
Droga od pomysłu do realizacji okazała się dużo dłuższa niż w przypadku systemu Transit. Główne części składowe pojawiły się na początku lat 70. W 1973 programy marynarki i lotnictwa połączono w jeden. Program opierał się na dwóch (trzech) prostych zasadach.
Misją programu było:
- Zrzucić pięć bomb w to samo miejsce.
- Zbudować tanie urządzenie nawigacyjne (<10 000 dolarów)
i nie zapomnieć o tym!
GPS NAVSTAR
Jasno postawiony cel nastręczał jednak pewnych trudności. Zrzucić pięć bomb to jednak co innego niż trafić rakietą w miasto, więc precyzja musiała być dużo wyższa. Koszty też były spore. System Transit korzystał z pięciu satelitów i jednego rezerwowego na orbicie. Początkowo do testów NAVSTAR zaakceptowano wystrzelenie czterech – akurat tylu ile potrzeba nad horyzontem do ustalenia pozycji. Środki na kolejne dwa satelity wyrwano z programu rakiet balistycznych. Okazało się, że testy pocisków Trident wymagają nowych sygnałów nadawanych przez satelity Transit. Ale zamiast modernizacji można było wysłać dwa dodatkowe satelity testowe NAVSTAR. Pieniądze (60 milionów dolarów) przekazano z marynarki do budżetu lotnictwa. Program nabrał tempa.
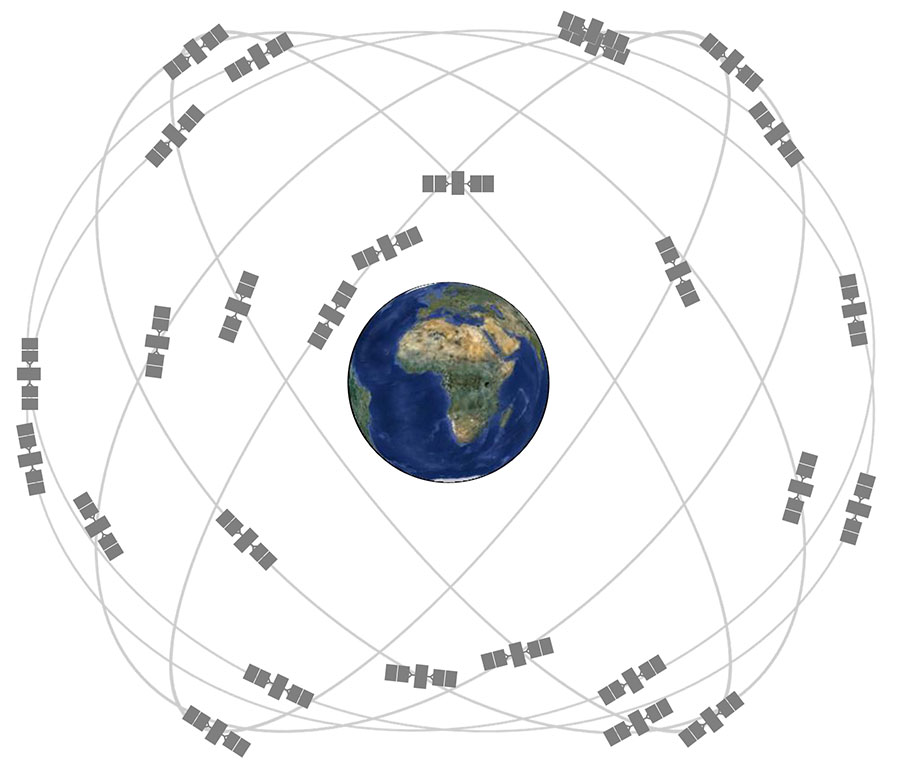
Używana do dziś konstelacja satelitów została zaprojektowana w 1973, a wszystkie testy prowadzone od wystrzelenia pierwszego satelity (w 1978) potwierdziły prawdziwość założeń teoretycznych. Wprowadzono tylko dwie kosmetyczne zmiany – liczba orbit wzrosła z trzech do czterech i zmieniono ich nachylenie. Liczba satelitów (24 wraz z zapasowymi) pozostała niezmienna (zmienił się tylko podział na orbity z 3×8 na 4×6). W tej konfiguracji jednocześnie nad horyzontem powinno znajdować się od sześciu do jedenastu satelitów.
Pierwsza faza to kolejne testy. Z planowanych 24 satelitów wystrzelono 12. W oparciu o ich sygnały sprawdzono jak GPS sprawdza się w nawigacji lotniczej i morskiej. W zależności od momentu prowadzenia badań i sprzętu uzyskano wyniki od 16 metrów (lotniskowiec na początku badań) do 6 metrów (bombowiec pod koniec testów). Wyniki bombardowań („zrzucić pięć bomb w to samo miejsce”) okazały się lepsze niż wyniki nalotów z wykorzystaniem radaru.
Pozostało zaczekać na umieszczenie pozostałych satelitów.
1983 – KAL 007
Kiedy w 1983 roku Sowieci zestrzelili pasażerski samolot lecący z Alaski do Korei, zginęło 269 osób. Z powodu błędu nawigacyjnego samolot (lot KAL 007) zszedł z trasy i wleciał w radziecką przestrzeń powietrzną nad Sachalinem. Myśliwiec przechwycił zgubioną maszynę i po nieskutecznej próbie zmuszenia do lądowania – zestrzelił.
Incydent świetnie pasował do reaganowskiej retoryki o „imperium zła”. Na fali krytyki związku radzieckiego zdecydowano o udostępnieniu GPS użytkownikom cywilnym, co miało zapobiec takim wypadkom w przyszłości.
Dodatkową korzyścią z udostępnienia GPS było przeniesienie kosztów rozwoju odbiorników na sektor cywilny.

1989 – NAV 1000
W 1989 firma Magellan wypuściła na rynek ręczny odbiornik GPS. Ważył mniej niż kilogram i kosztował dwa tysiące dolarów. Jedną piątą ceny, która dla wojska była granicą opłacalności. Wraz z kolejnymi urządzeniami cena spadła najpierw do kilkuset, potem do kilkudziesięciu dolarów. W tej chwili najtańszy odbiornik GPS można kupić za kilka (w sprzedaży detalicznej).
NAV 1000 był zasilany sześcioma bateriami AA i oferował zapis 100 punktów w pamięci oraz wyznaczanie kierunku i odległości między punktami, a także prowadzenie użytkownika po trasie wyznaczonej za pomocą współrzędnych. Ze względu na różne systemy używane w kartografii mógł wyświetlać pozycję w 12 zaprogramowanych układach odniesienia (w późniejszych urządzeniach z większości zrezygnowano).
Precyzja wskazań wczesnych cywilnych odbiorników była ograniczona do nieco ponad 100 metrów (średnio 50 metrów w poziomie i średnio 100 metrów w pionie). Ograniczenie wynikało funkcji Selective Availability i było wprowadzane na poziomie sygnału, a nie odbiornika (stąd „selective” – funkcję można było wyłączyć).
1991 – Wojna w Zatoce Perskiej
Magellan NAV 1000 okazał się sukcesem rynkowym podczas wojny w Zatoce. Urządzenie sprzedawało się świetnie i większość używanych przez żołnierzy odbiorników to były właśnie cywilne NAV 1000, a nie urządzenia wojskowe.
Ze względu na powszechność cywilnych odbiorników w siłach zbrojnych na okres wojny wyłączono Selective Availability. Później SA wyłączano kilkakrotnie. Zwykle przy okazji dużych operacji wojskowych, podczas których żołnierze korzystali z cywilnych GPSów.
1994 – kompletna konstelacja satelitów, odbiór sygnału za darmo
Na przełomie 1993 i 1994 wyniesiono na orbitę ostatniego satelitę serii Block II A. System był kompletny i pokrywał świat w 100%, przez całą dobę.
Prezydent Bill Clinton ogłosił, że GPS będzie systemem dostępnym za darmo.
2000 – Selective Availability wyłączone
Rozwój konkurencyjnych i uzupełniających systemów nawigacyjnych – szczególnie rosyjskiego GLONASS oraz urządzeń korygujących błędy GPS z czasem wyeliminował realne zastosowanie Selective Availability. Za likwidacją tej funkcji przemawiał też rachunek ekonomiczny – bardziej precyzyjny GPS mógł być wykorzystany w nawigacji samochodowej i w precyzyjnej nawigacji lotniczej (np. podczas podejścia do lądowania). A to przekładało się na spore zyski w gospodarkach (w tym, a może przede wszystkim, w gospodarce amerykańskiej).
2001 – rozwój samochodowych urządzeń nawigacyjnych
Zwiększona precyzja dała nowe możliwości wykorzystania. Firmy takie jak TomTom zaczęły produkcję samochodowych nawigacji satelitarnych.
2004 – Assisted GPS
Firma Qualcomm rozwija Assisted GPS – tryb pracy, w którym urządzenie pobiera dane o satelitach z innego źródła niż system GPS – dziś takie rozwiązanie jest standardem w telefonach z GPS, które pobierają dane z sieci komórkowej, jeśli ta jest dostępna. To zmniejsza czas potrzebny na pierwsze wyznaczenie pozycji i pozwala na bardziej oszczędną pracę.
Dziś – 31 satelitów
W 2012 na orbicie znalazł się 31 satelita. Konstelacja jest pełna, a liczba satelitów zapasowych większa niż niezbędne minimum.